进程:
程序:死的。只占用磁盘空间。
进程;活的。运行起来的程序。占用内存、cpu等系统资源。
PCB进程控制块:
进程id
文件描述符表
进程状态: 初始态、就绪态、运行态、挂起态、终止态。
进程工作目录位置
*umask掩码
信号相关信息资源。
用户id和组id
fork函数:
pid_t fork(void)
创建子进程。父子进程各自返回。父进程返回子进程pid。 子进程返回 0.
getpid();getppid();
循环创建N个子进程模型。 每个子进程标识自己的身份。
父子进程相同:
刚fork后。 data段、text段、堆、栈、环境变量、全局变量、宿主目录位置、进程工作目录位置、信号处理方式
父子进程不同:
进程id、返回值、各自的父进程、进程创建时间、闹钟、未决信号集
父子进程共享:
读时共享、写时复制。———————— 全局变量。
1. 文件描述符 2. mmap映射区。
gdb调试:
设置父进程调试路径:set follow-fork-mode parent (默认)
设置子进程调试路径:set follow-fork-mode child
exec函数族:
使进程执行某一程序。成功无返回值,失败返回 -1
int execlp(const char *file, const char *arg, ...); 借助 PATH 环境变量找寻待执行程序
参1: 程序名
参2: argv0
参3: argv1
...: argvN
哨兵:NULL
int execl(const char *path, const char *arg, ...); 自己指定待执行程序路径。
int execvp();
ps ajx –> pid ppid gid sid
孤儿进程:
父进程先于子进终止,子进程沦为“孤儿进程”,会被 init 进程领养。
僵尸进程:
子进程终止,父进程尚未对子进程进行回收,在此期间,子进程为“僵尸进程”。 kill 对其无效。
wait函数: 回收子进程退出资源, 阻塞回收任意一个。
pid_t wait(int *status)
参数:(传出) 回收进程的状态。
返回值:成功: 回收进程的pid
失败: -1, errno
函数作用1: 阻塞等待子进程退出
函数作用2: 清理子进程残留在内核的 pcb 资源
函数作用3: 通过传出参数,得到子进程结束状态
获取子进程正常终止值:
WIFEXITED(status) --》 为真 --》调用 WEXITSTATUS(status) --》 得到 子进程 退出值。
获取导致子进程异常终止信号:
WIFSIGNALED(status) --》 为真 --》调用 WTERMSIG(status) --》 得到 导致子进程异常终止的信号编号。
waitpid函数: 指定某一个进程进行回收。可以设置非阻塞。 waitpid(-1, &status, 0) == wait(&status);
pid_t waitpid(pid_t pid, int *status, int options)
参数:
pid:指定回收某一个子进程pid
> 0: 待回收的子进程pid
-1:任意子进程
0:同组的子进程。
status:(传出) 回收进程的状态。
options:WNOHANG 指定回收方式为,非阻塞。
返回值:
> 0 : 表成功回收的子进程 pid
0 : 函数调用时, 参3 指定了WNOHANG, 并且,没有子进程结束。
-1: 失败。errno
总结:
wait、waitpid 一次调用,回收一个子进程。
想回收多个。while
进程间通信的常用方式,特征:
管道:简单
信号:开销小
mmap映射:非血缘关系进程间
socket(本地套接字):稳定
管道:
实现原理: 内核借助环形队列机制,使用内核缓冲区实现。
特质; 1. 伪文件
2. 管道中的数据只能一次读取。
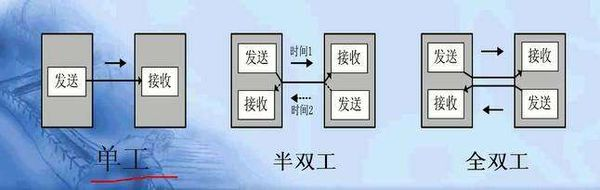
3. 数据在管道中,只能单向流动。
局限性:1. 自己写,不能自己读。
2. 数据不可以反复读。
3. 半双工通信。
4. 血缘关系进程间可用。
pipe函数: 创建,并打开管道。
int pipe(int fd[2]);
参数: fd[0]: 读端。
fd[1]: 写端。
返回值: 成功: 0
失败: -1 errno
管道的读写行为:
读管道:
1. 管道有数据,read返回实际读到的字节数。
2. 管道无数据: 1)无写端,read返回0 (类似读到文件尾)
2)有写端,read阻塞等待。
写管道:
1. 无读端, 异常终止。 (SIGPIPE导致的)
2. 有读端: 1) 管道已满, 阻塞等待
2) 管道未满, 返回写出的字节个数。
pipe管道: 用于有血缘关系的进程间通信。 ps aux | grep ls | wc -l
父子进程间通信:
兄弟进程间通信:
fifo管道:可以用于无血缘关系的进程间通信。
命名管道: mkfifo
无血缘关系进程间通信:
读端,open fifo O_RDONLY
写端,open fifo O_WRONLY
文件实现进程间通信:
打开的文件是内核中的一块缓冲区。多个无血缘关系的进程,可以同时访问该文件。
共享内存映射:
void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset); 创建共享内存映射
参数:
addr: 指定映射区的首地址。通常传NULL,表示让系统自动分配
length:共享内存映射区的大小。(<= 文件的实际大小)
prot: 共享内存映射区的读写属性。PROT_READ、PROT_WRITE、PROT_READ|PROT_WRITE
flags: 标注共享内存的共享属性。MAP_SHARED、MAP_PRIVATE
fd: 用于创建共享内存映射区的那个文件的 文件描述符。
offset:默认0,表示映射文件全部。偏移位置。需是 4k 的整数倍。
返回值:
成功:映射区的首地址。
失败:MAP_FAILED (void*(-1)), errno
int munmap(void *addr, size_t length); 释放映射区。
addr:mmap 的返回值
length:大小
使用注意事项:
1. 用于创建映射区的文件大小为 0,实际指定非0大小创建映射区,出 “总线错误”。
2. 用于创建映射区的文件大小为 0,实际制定0大小创建映射区, 出 “无效参数”。
3. 用于创建映射区的文件读写属性为,只读。映射区属性为 读、写。 出 “无效参数”。
4. 创建映射区,需要read权限。当访问权限指定为 “共享”MAP_SHARED是, mmap的读写权限,应该 <=文件的open权限。 只写不行。
5. 文件描述符fd,在mmap创建映射区完成即可关闭。后续访问文件,用 地址访问。
6. offset 必须是 4096的整数倍。(MMU 映射的最小单位 4k )
7. 对申请的映射区内存,不能越界访问。
8. munmap用于释放的 地址,必须是mmap申请返回的地址。
9. 映射区访问权限为 “私有”MAP_PRIVATE, 对内存所做的所有修改,只在内存有效,不会反应到物理磁盘上。
10. 映射区访问权限为 “私有”MAP_PRIVATE, 只需要open文件时,有读权限,用于创建映射区即可。
mmap函数的保险调用方式:
1. fd = open("文件名", O_RDWR);
2. mmap(NULL, 有效文件大小, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0);
父子进程使用 mmap 进程间通信:
父进程 先 创建映射区。 open( O_RDWR) mmap( MAP_SHARED );
指定 MAP_SHARED 权限
fork() 创建子进程。
一个进程读, 另外一个进程写。
无血缘关系进程间 mmap 通信: 【会写】
两个进程 打开同一个文件,创建映射区。
指定flags 为 MAP_SHARED。
一个进程写入,另外一个进程读出。
【注意】:无血缘关系进程间通信。mmap:数据可以重复读取。
fifo:数据只能一次读取。
匿名映射:只能用于 血缘关系进程间通信。
p = (int *)mmap(NULL, 40, PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANONYMOUS, -1, 0);
信号共性:
简单、不能携带大量信息、满足条件才发送。
信号的特质:
信号是软件层面上的“中断”。一旦信号产生,无论程序执行到什么位置,必须立即停止运行,处理信号,处理结束,再继续执行后续指令。
所有信号的产生及处理全部都是由【内核】完成的。
信号相关的概念:
产生信号:
1. 按键产生
2. 系统调用产生
3. 软件条件产生
4. 硬件异常产生
5. 命令产生
概念:
未决:产生与递达之间状态。
递达:产生并且送达到进程。直接被内核处理掉。
信号处理方式: 执行默认处理动作、忽略、捕捉(自定义)
阻塞信号集(信号屏蔽字): 本质:位图。用来记录信号的屏蔽状态。一旦被屏蔽的信号,在解除屏蔽前,一直处于未决态。
未决信号集:本质:位图。用来记录信号的处理状态。该信号集中的信号,表示,已经产生,但尚未被处理。
信号4要素:
信号使用之前,应先确定其4要素,而后再用!!!
编号、名称、对应事件、默认处理动作。
kill命令 和 kill函数:
int kill(pid_t pid, int signum)
参数:
pid: > 0:发送信号给指定进程
= 0:发送信号给跟调用kill函数的那个进程处于同一进程组的进程。
< -1: 取绝对值,发送信号给该绝对值所对应的进程组的所有组员。
= -1:发送信号给,有权限发送的所有进程。
signum:待发送的信号
返回值:
成功: 0
失败: -1 errno
alarm 函数:使用自然计时法。
定时发送SIGALRM给当前进程。
unsigned int alarm(unsigned int seconds);
seconds:定时秒数
返回值:上次定时剩余时间。
无错误现象。
alarm(0); 取消闹钟。
time 命令 : 查看程序执行时间。 实际时间 = 用户时间 + 内核时间 + 等待时间。 --》 优化瓶颈 IO
setitimer函数:
int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value);
参数:
which: ITIMER_REAL: 采用自然计时。 ——> SIGALRM
ITIMER_VIRTUAL: 采用用户空间计时 ---> SIGVTALRM
ITIMER_PROF: 采用内核+用户空间计时 ---> SIGPROF
new_value:定时秒数
类型:struct itimerval {
struct timeval {
time_t tv_sec; /* seconds */
suseconds_t tv_usec; /* microseconds */
}it_interval;---> 周期定时秒数
struct timeval {
time_t tv_sec;
suseconds_t tv_usec;
}it_value; ---> 第一次定时秒数
};
old_value:传出参数,上次定时剩余时间。
e.g.
struct itimerval new_t;
struct itimerval old_t;
new_t.it_interval.tv_sec = 0;
new_t.it_interval.tv_usec = 0;
new_t.it_value.tv_sec = 1;
new_t.it_value.tv_usec = 0;
int ret = setitimer(&new_t, &old_t); 定时1秒
返回值:
成功: 0
失败: -1 errno
其他几个发信号函数:
int raise(int sig);
void abort(void);
信号集操作函数:
sigset_t set; 自定义信号集。
sigemptyset(sigset_t *set); 清空信号集
sigfillset(sigset_t *set); 全部置1
sigaddset(sigset_t *set, int signum); 将一个信号添加到集合中
sigdelset(sigset_t *set, int signum); 将一个信号从集合中移除
sigismember(const sigset_t *set,int signum); 判断一个信号是否在集合中。 在--》1, 不在--》0
设置信号屏蔽字和解除屏蔽:
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);
how: SIG_BLOCK: 设置阻塞
SIG_UNBLOCK: 取消阻塞
SIG_SETMASK: 用自定义set替换mask。
set: 自定义set
oldset:旧有的 mask。
查看未决信号集:
int sigpending(sigset_t *set);
set: 传出的 未决信号集。
【信号捕捉】:
signal();
【sigaction();】 重点!!!
信号捕捉特性:
1. 捕捉函数执行期间,信号屏蔽字 由 mask --> sa_mask , 捕捉函数执行结束。 恢复回mask
2. 捕捉函数执行期间,本信号自动被屏蔽(sa_flgs = 0).
3. 捕捉函数执行期间,被屏蔽信号多次发送,解除屏蔽后只处理一次!
借助信号完成 子进程回收。
守护进程:
daemon进程。通常运行与操作系统后台,脱离控制终端。一般不与用户直接交互。周期性的等待某个事件发生或周期性执行某一动作。
不受用户登录注销影响。通常采用以d结尾的命名方式。
守护进程创建步骤:
1. fork子进程,让父进程终止。
2. 子进程调用 setsid() 创建新会话
3. 通常根据需要,改变工作目录位置 chdir(), 防止目录被卸载。
4. 通常根据需要,重设umask文件权限掩码,影响新文件的创建权限。 022 -- 755 0345 --- 432 r---wx-w- 422
5. 通常根据需要,关闭/重定向 文件描述符
6. 守护进程 业务逻辑。while()